































Vincitore assoluto: team Bullseye dell'Università di Wageningen, Paesi Bassi; Attività di freestyle con concetti visionari; La simulazione sul campo si rivela una sfida con grandi vantaggi in termini di apprendimento; Più di 500 telespettatori internazionali online in tre giorni
(DLG) In collaborazione con DLG Feldtage e tenuto quest'anno per la prima volta in formato virtuale sulla piattaforma digitale di DLG, il 18° evento internazionale Field Robot, un concorso di robot da campo per squadre di studenti internazionali, si è concluso alla grande con l'annuncio di i vincitori, presentati dagli organizzatori, l'Università di Hohenheim e l'Università di Wageningen. Il vincitore assoluto dell'evento 2021 è il team Bullseye dell'Università di Wageningen, Paesi Bassi, che è stato giudicato in base alle sue prestazioni in quattro compiti sul campo stabiliti che includevano la navigazione in file curve di mais, in file diritte con o senza piante mancanti, il riconoscimento di erbacce e rifiuti e successivo spostamento a promontorio. L'evento freestyle, un evento facoltativo che consente ai team di studenti di mettere in mostra le proprie abilità ingegneristiche risolvendo un compito agricolo autoselezionato, è stato vinto dal team Ceres, Università di Scienze Applicate di Münster, con il suo robot raccoglitore in grado di rilevare e raccogliere le zucche .
Si sintonizzano 518 telespettatori internazionali
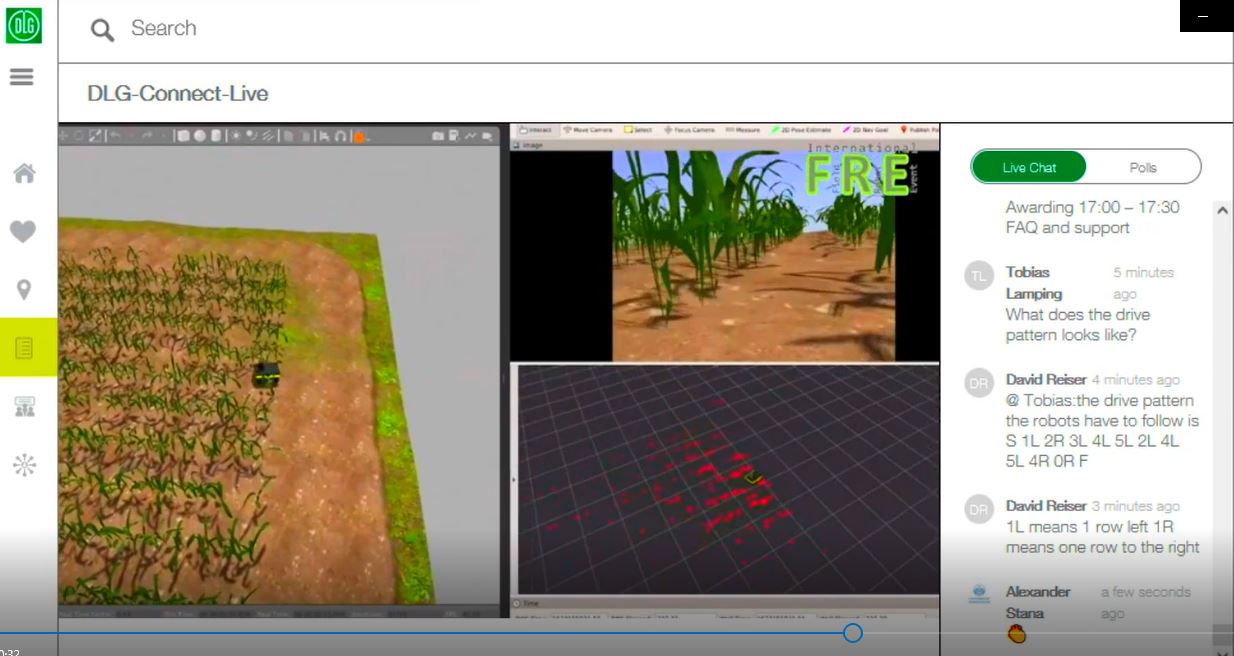
L'evento ha attirato 518 spettatori da tutto il mondo, tra cui non solo specialisti tecnici e accademici, ingegneri, personale universitario e studenti, ma anche agricoltori provenienti da diversi paesi. All'evento dal vivo, seguito da giornalisti internazionali, hanno partecipato anche partecipanti del settore, come i product manager, che si sono sintonizzati per osservare i robot esibirsi in un ambiente di simulazione fotorealistico simile a quello utilizzato dalla NASA per l'esplorazione spaziale. Tramite una chat dal vivo, gli spettatori hanno avuto la possibilità di interagire con le 14 squadre internazionali provenienti da Danimarca, Germania, Paesi Bassi, Romania e Slovenia, nonché con esperti e altri spettatori.
Premio di collaborazione per lo sviluppo di campi di mais virtuali
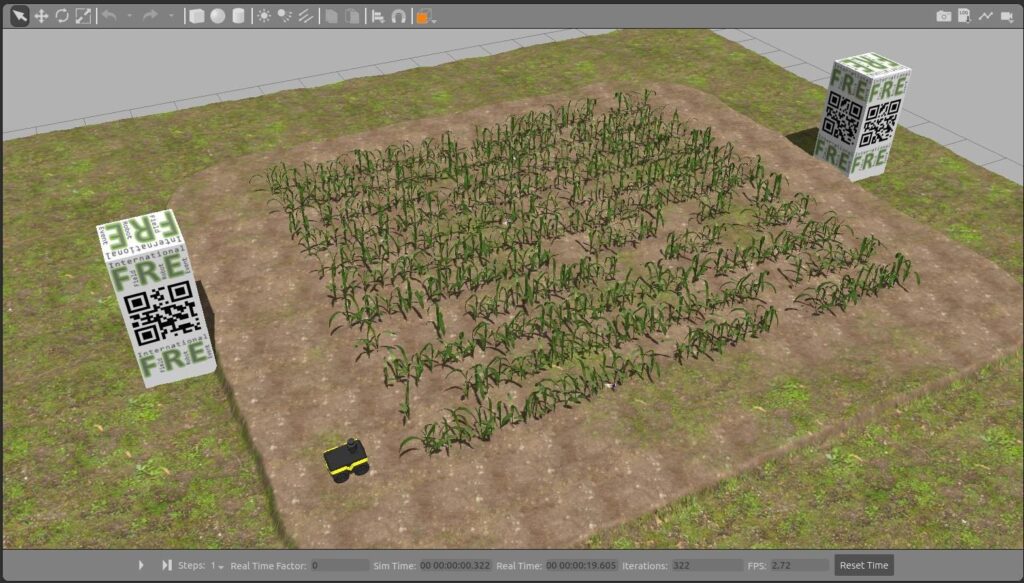
Il premio onorario per la collaborazione è stato assegnato a Kamaro Engineering, un team di studenti di ingegneria per robot da campo innovativi del Karlsruhe Institute of Technology (KIT). Il premio per la collaborazione riconosce il contributo allo sviluppo del campo di mais virtuale negli ambienti simulati. Questo lavoro ha comportato la scrittura di un codice che descrivesse accuratamente l’aspetto di una pianta di mais e di altri componenti, oltre a creare effetti reali come vento e ombre per mettere in atto una serie di scenari di campi agricoli, in particolare il riconoscimento delle erbe infestanti e il rilevamento degli ostacoli.
Due squadre di talenti in età scolare
Quest'anno, due squadre – Carbonite e Camper Robotic – erano composte da bambini in età scolare con talenti tecnici provenienti rispettivamente dalle città tedesche di Amburgo e Überlingen. Il team di Camper Robotic aveva sviluppato un tipo di robot “Segway” unico chiamato Field Balancer. Il team Carbonite si è distinto in diversi compiti, arrivando terzo assoluto.
“Questo evento virtuale è stato una novità e siamo molto soddisfatti del risultato e del feedback degli studenti. Un ambiente simulato costituisce gran parte del lavoro di sviluppo di un robot da campo. Credo che questo evento, che si svolge dal vivo in un ambiente simulato, sia un esercizio fantastico e stimolante non solo per stabilire di cosa è capace il sistema, ma anche per confrontarlo con altri team. Ciò porterà notevoli benefici in termini di apprendimento per molti mesi a venire”, ha affermato il Prof. Hans W. Griepentrog, Direttore della Sezione di Tecnologia nella Produzione Vegetale, Università di Hohenheim, Germania.
“Gli ambienti di simulazione ROS Gazebo, che abbiamo creato appositamente per questo evento, sono stati utili ai team studenteschi e quindi abbiamo deciso di mantenerli disponibili dopo il concorso, in modo che gli studenti possano testare le loro future simulazioni di robot sul campo su quella piattaforma, ” ha concluso il prof. Griepentrog.
Evento di freestyle – concetti futuri
L'attività di freestyle all'interno dell'evento è sempre un momento clou per gli spettatori e offre una finestra sul futuro con concetti visionari per applicazioni sul campo, selezionati e sviluppati dai team stessi. Categoria facoltativa del concorso, il compito offriva ai team di studenti l'opportunità di mostrare le proprie capacità nello sviluppo di una soluzione per un compito pratico sul campo di loro scelta. All'evento di quest'anno, i compiti di freestyle sono stati presentati dagli studenti sotto forma di video. Le attività di freestyle includevano un robot raccoglitore di Ceres, che ha vinto la categoria freestyle. Al secondo posto, sviluppato dal team FarmBeast dell'Università di Maribor, c'era un attrezzo di irrorazione in grado di riconoscere le erbe infestanti e di irrorare il bersaglio solo dove necessario, contribuendo alla protezione del suolo. Al terzo posto si è piazzato il team Kamaro con il suo robot da campo Beteigeuze, che si è presentato come un robot da campo modulare e autoconfigurante con molteplici accessori, compresi quelli basati su rimorchio.
L'evento internazionale sui robot da campo è un concorso internazionale di robot da campo che comprende varie attività sul campo. Navigare con il robot tra filari curvi di colture, riconoscere oggetti che sono erbacce o semplicemente spazzatura e mappare gli oggetti utilizzando la georeferenziazione fanno parte delle sfide che vengono risolte dai robot sul campo utilizzando sensori e algoritmi. Interpretare le informazioni in tempo reale, come determinare cos'è l'erba utilizzando una fotocamera, è complesso e richiede molti mesi di lavoro di sviluppo preliminare. Un ulteriore compito richiedeva la rimozione delle erbacce e dei rifiuti, per cui è necessario un accurato controllo software degli attuatori che azionano lo strumento. La sfida è dare un senso intelligente ai dati del giorno, il che implica che il robot interpreti le informazioni fornite e prenda decisioni ottimali. Complessità, prestazioni e utilità agricola sono stati i principali criteri di valutazione.
Disponibili i video del concorso
I video on demand dell'evento di tre giorni sui robot sul campo, che includono tutte le attività sul campo simulate, i commenti dei giudici e i video inviati dalle squadre per l'attività di freestyle, sono disponibili sulla piattaforma online di DLG come collegamenti separati per ogni giorno dell'evento:
8 giugno: Navigazione in un campo di mais a filari curvi; Filari dritti con piante mancanti. Link
9 giugno: Rilevamento e georeferenziazione di erbe infestanti e oggetti; rimozione a promontorio. Link
10 giugno: Evento Freestyle. Link
I dettagli completi sui vincitori di ciascuna delle cinque categorie e sui loro punteggi sono disponibili su. https://www.fieldrobot.com/event/
L'evento internazionale sui robot da campo si è svolto sulla piattaforma digitale della DLG, che ospita anche eventi agricoli digitali su larga scala. La piattaforma è una piattaforma di connessione che offre ai propri utenti sia contenuti di prodotto che interazioni individuali, di gruppo o pubbliche.
Ricerca pratica sui robot sul campo dal 2003
Il concorso sui robot da campo, lanciato nel 2003 dall’Università di Wageningen nei Paesi Bassi, testa le tecnologie pionieristiche della robotica e dell’agricoltura di precisione in condizioni reali e offre ai giovani scienziati l’opportunità di scambiare e sviluppare le loro idee insieme ai loro colleghi. Come nell'evento sul campo, i concorrenti nell'evento virtuale hanno avuto l'opportunità di interagire tra loro e con gli spettatori internazionali. Questa interazione è una parte importante dell'evento e li ha aiutati a portare avanti i loro concetti.
Il Field Robot Event 2021, che si tiene dal 2014 alla fiera DLG-Feldtage, ha offerto impegnativi test virtuali per i robot e i loro inventori, nonché un entusiasmante intrattenimento per gli spettatori virtuali.]

{kind=link}